
新闻稿
NEW
案例
上次我们介绍了Main-Link相关的设计指南,这次我们将详细介绍传输控制信号的Sub-Link相关的设计指南。
什么是Sub-Link
首先,在开始介绍关于Sub-Link的具体内容前,我们想以对应V-by-One® HS 的传送IC 「THCV241A」为例,整理一下Main-Link与Sub-Link各自的概要(图1)。「THCV241A」是可将相机模组输出的MIPI® CSI-2信号转换为V-by-One HS信号的IC;Main-Link就是指传输这些V-by-One HS信号本身的传输路径。另外,「THCV241A」在这之外还装载了I2C与GPIO(通用输入/输出信号)的控制信号接口,而这些信号在传送IC与接收IC间相互传导时使用的传输路径就是Sub-Link。使用Sub-Link,不但能通过传送IC与接收IC进行影像数据的传输,还能实现从SoC上关闭相机模组电源、重启、点亮LED灯等各种不同的系统设定。此外,使用Sub-Link功能时,Sub-Link与Main-Link一样需要连接到接收IC。
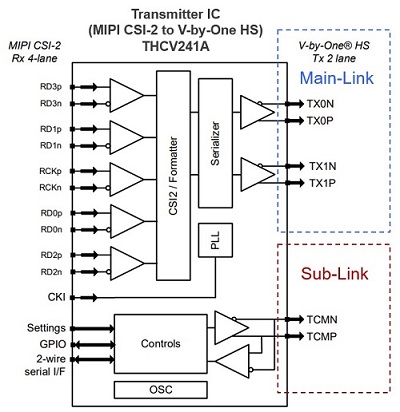
图1 传送IC THCV241Aの模块图
Sub-Link:充分使用Through GPIO与Register GPIO
如前所述,可以通过Sub-Link传输I2C和GPIO信号;而GPIO的控制方式有Through GPIO与Register GPIO两种。电子设备厂商(客户)必须掌握这两种控制方式,找出最合适的系统。
首先,Through GPIO是一种可以仿佛不存在一样通过相机模组与SoC之间的传送IC与接收IC,直接从SoC上控制相机模组的方法。所以它的优点是无需修改SoC的设定就能对应远距离传输。此外,由于它只是通过了传送IC与接收IC,因此可以从SoC上即时控制相机模组。
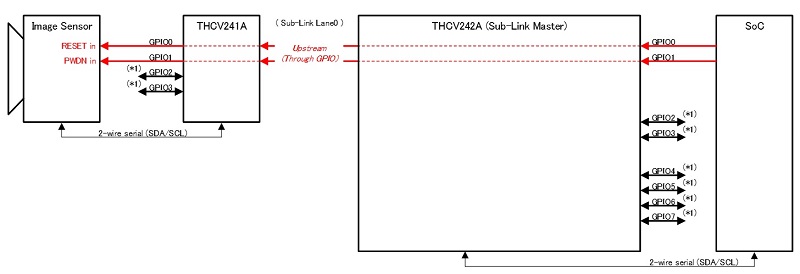
但「THCV241A」与「THCV242A」的组合中,可作为Through GPIO使用的GPIO端子最多有4根--(GPIO0、GPIO1、GPIO2、GPIO3),且有上流和下流各2根的限制(图2)。所以,若连接的相机模组个数增加,需通过GPIO端子来控制的要素也增加的话,仅依靠Through GPIO来进行控制就会比较困难。
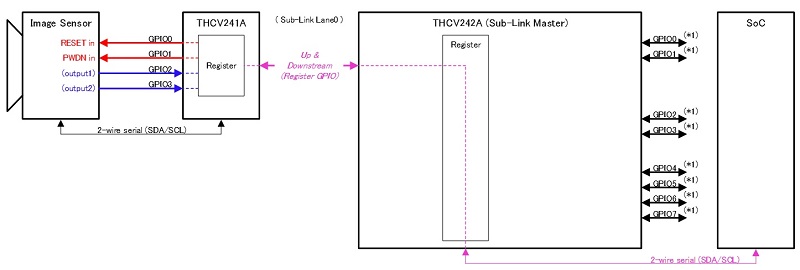
因此就需要Register GPIO来弥补Through GPIO无法覆盖的控制。Register GPIO是一种通过I2C总线,从SoC上以需求时序重写传送IC以及接收IC的电阻,来实现所需要的控制的方法(图3)。这样就可以超越Through GPIO的限制,组成更复杂的系统。
不过,Register GPIO与Through GPIO相比有两点需要注意。一个是需要在SoC控制软件上加入Register GPIO控制的新规范。根据SoC的时序,在通过I2C总线重写各电阻内容的同时控制GPIO端子。另一个就是即时性较差。因为需要重写电阻,然后传送IC与接收IC根据这个内容来工作,就会产生latency(延迟时间)。系统工程师需要考量Through GPIO与Register GPIO各自的限制和特性后再开始探讨系统。
首先,Through GPIO是一种可以仿佛不存在一样通过相机模组与SoC之间的传送IC与接收IC,直接从SoC上控制相机模组的方法。所以它的优点是无需修改SoC的设定就能对应远距离传输。此外,由于它只是通过了传送IC与接收IC,因此可以从SoC上即时控制相机模组。
但「THCV241A」与「THCV242A」的组合中,可作为Through GPIO使用的GPIO端子最多有4根--(GPIO0、GPIO1、GPIO2、GPIO3),且有上流和下流各2根的限制(图2)。所以,若连接的相机模组个数增加,需通过GPIO端子来控制的要素也增加的话,仅依靠Through GPIO来进行控制就会比较困难。
图2 仅使用Through GPIO的配置示例
因此就需要Register GPIO来弥补Through GPIO无法覆盖的控制。Register GPIO是一种通过I2C总线,从SoC上以需求时序重写传送IC以及接收IC的电阻,来实现所需要的控制的方法(图3)。这样就可以超越Through GPIO的限制,组成更复杂的系统。
图3 使用Register GPIO的控制示例
不过,Register GPIO与Through GPIO相比有两点需要注意。一个是需要在SoC控制软件上加入Register GPIO控制的新规范。根据SoC的时序,在通过I2C总线重写各电阻内容的同时控制GPIO端子。另一个就是即时性较差。因为需要重写电阻,然后传送IC与接收IC根据这个内容来工作,就会产生latency(延迟时间)。系统工程师需要考量Through GPIO与Register GPIO各自的限制和特性后再开始探讨系统。
EXSYNC:多个相机同步
Sub-Link的设计指南最后提到了名为「EXSYNC」的功能(图4)。EXSYNC是如立体相机等、需使两台相机模组与SoC同步进行作业的功能。实现方法有两种。一种是将SoC上产生的同步信号用Through GPIO分配到两台相机模组上的方法。另一种是将接收IC内置的同步发生器(Sync Generator)上产生的同步信号,用Through GPIO分配到两台相机模组上的同时,通过专用的EXSYNC端子传输到SoC上的方法。无论使用哪种方法,都能实现同步的多个相机系统。
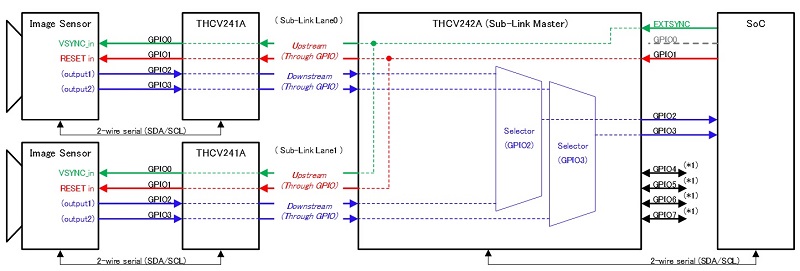
图4 使用EXTSYNC功能实现同步多相机系统
接口本身没有附加价值
加上上一次的Main-Link篇,我们介绍了两个设计指南,旨在减少探讨系统时所需的时间和精力。对装载相机模组的电子设备来说,接口本身没有附加价值。我们期待的是这两个设计指南能为客户节约时间与精力,将这一时间与精力用于探寻真正的附加价值中去。